Т
获取相似产品集合

Промышленный робот Kawasaki CP300L
Транспортные компании

交货条件
描述
性能
- 审计
- 未进行
- Тип
- Промышленный робот
- Страна изготовителя
- Китай
- Производитель
- Kawasaki Robotics
- Категория
- Роботы для паллетирования
- Тип робота
- Шарнирный
- Управляемых осей (Степени свободы)
- 4
- Полезная нагрузка на кисть (кг)
- 300
- Повторяемость (мм) (Соответствует ISO9283)
- ±0.05
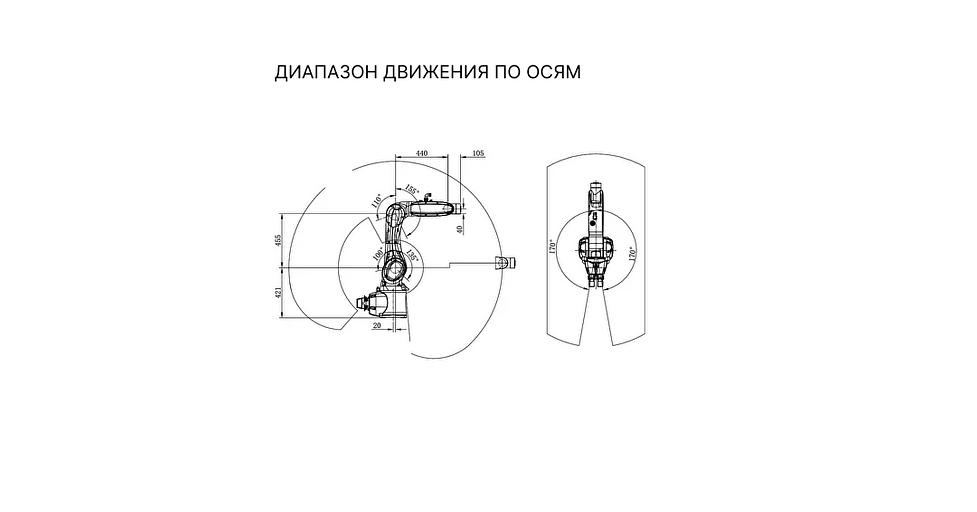
- Угол поворота, рука вращение (JT1), (°)
- ±160
- Угол поворота, рука вперед-назад (JT2), (°)
- +95 − -46
- Угол поворота, рука вверх-вниз (JT3), (°)
- +15 — -110
- Угол поворота, запястье поворот (JT4), (°)
- ±360
- Максимальная скорость (°/s), рука вращение (JT1) (В случае нагрузки 250 кг или меньше)
- 115
- Максимальная скорость (°/s), рука вперед-назад (JT2) (В случае нагрузки 250 кг или меньше)
- 100
- Максимальная скорость (°/s), рука вверх-вниз (JT3) (В случае нагрузки 250 кг или меньше)
- 100
- Максимальная скорость (°/s), запястье поворот (JT4) (В случае нагрузки 250 кг или меньше)
- 250
- Рабочая ширина (мм)
- 1,800
- Рабочая глубина (мм)
- 1,600
- Рабочая высота (мм)
- 2,200
- Момент инерции (kg•㎡) (В случае нагрузки 250 кг или меньше)
- 100
- Производительность по укладке на поддоны (цикл/час) (В случае нагрузки 250 кг или меньше)
- 1700
- Масса (кг)
- 1,600
- Цвет корпуса
- Munsell 10GY9/1 equivalent
- Монтажное положение
- Floor
- Температурный режим (°C)
- 0-45
- Относительная влажность (%)
- 35-85 (строгое отсутствие конденсата или инея)
- Требования по электропитанию (kVA) (Зависит от полезной нагрузки и схемы движения)
- 12
- Контроллер
- E03
Документы
ДЕКЛАРАЦИЯ О СООТВЕТСТВИИ
354 КБ
PDF
РАЗМЕРЫ И ДИАПАЗОНЫ ДВИЖЕНИЯ
203 КБ
PDF
3D CAD-МОДЕЛЬ
2 МБ
ZIP
2D CAD-МОДЕЛЬ
3 МБ
ZIP
#D2402008306
持续性报价, 一点一点
按需询价
库存 ∞

Компания
Просмотры 758
Кол-во продаж 758
Аудиторская проверка Пройдена
Дата публикации February 20, 2024
Получение
Москва Изменить
自提
不迟于 11 July 免费