Т
获取相似产品集合

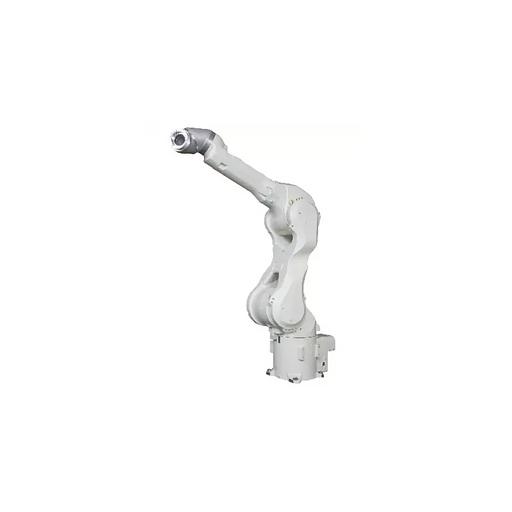
Промышленный робот манипулятор CRP-RA07A-08
运输公司







交货条件
描述
性能
- 审计
- 未进行
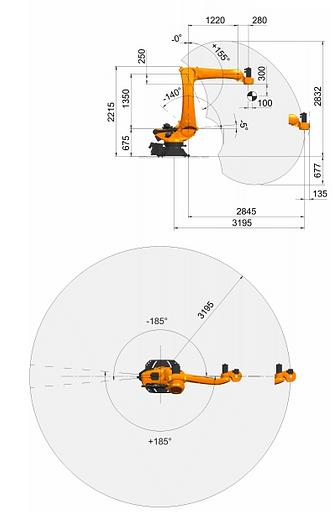
- Длина руки, мм
- 712
- Грузоподъемность, кг
- 8
- CRP-RH18-20, форма руки
- Вертикальный узловой шарнир
- CRP-RH18-20, степень подвижности
- 6 осей
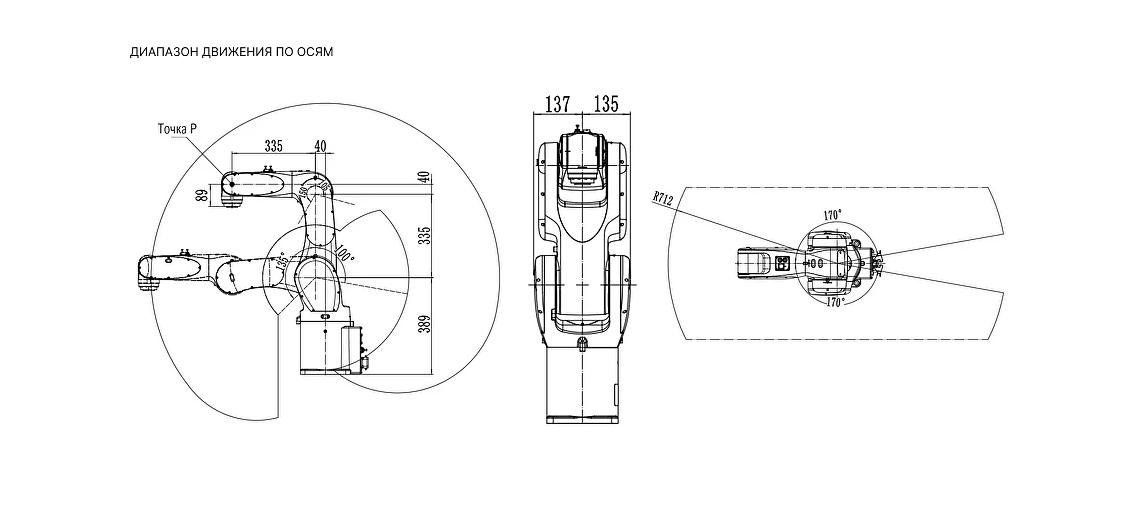
- CRP-RH14-10, диапазон движения ось 1
- -170°~170°
- Диапазон движения ось 2
- -44°~188°
- Диапазон движения ось 3
- -62°~180°
- Диапазон движения ось 4
- -185°~185°
- Диапазон движения ось 5
- -120°~125°
- CRP-RH18-20, диапазон движения ось 6
- -360°~360°
- Максимальная скорость движения ось 1
- 400°/секунду
- Максимальная скорость движения ось 2
- 340°/секунду
- Максимальная скорость движения ось 3
- 370°/секунду
- Максимальная скорость движения ось 4
- 535°/секунду
- Максимальная скорость движения ось 5
- 411°/секунду
- Максимальная скорость движения ось 6
- 698°/секунду
- Точность повторного позиционирования
- ±0.02 мм
- Максимальный охват
- 712 мм
- Вес робота
- 44 кг
- CRP-RH14-10, допустимый инерционный момент, ось 4
- к поверхности пола или потолка
- CRP-RH14-10, допустимый инерционный момент, ось 5
- 0-45°C
- CRP-RH14-10, допустимый инерционный момент, ось 6
- 20-85% (без конденсата)
- CRP-RH14-10, точность повторного позиционирования
- < 0.5 G
- CRP-RH14-10, Максимальный охват
- Робот должен быть установлен вдалеке от горючих или коррозионных жидкостей и газов, источников электрических помех
- Уровень IP
- IP54/IP65
- CRP-RH14-10, способ крепления
- Компактные размеры, высокая скорость, высокая точность, легкое управление, обширные области применения
- Применение
- Сварка, резка, сборка, транспортировка, шлифовка, маркировка
#D2306014804
持续性报价, 一点一点
按需询价
库存 ∞

Компания
Аудиторская проверка Пройдена
Дата публикации June 23, 2023
Получение
Москва Изменить