Т
获取相似产品集合

Промышленный робот манипулятор CRP-RA09A-06
运输公司





交货条件
描述
性能
- 审计
- 未进行
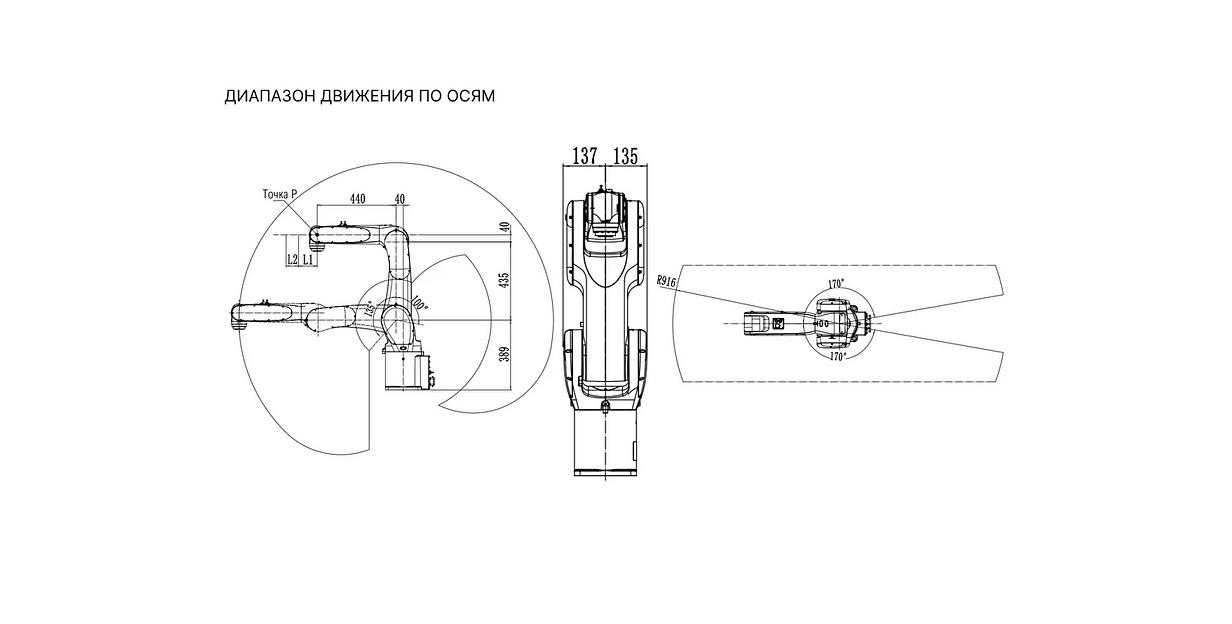
- Длина руки, мм
- 916
- Грузоподъемность, кг
- 7
- CRP-RH18-20, форма руки
- Вертикальный узловой шарнир
- CRP-RH18-20, степень подвижности
- 6 осей
- CRP-RH14-10, диапазон движения ось 1
- -170°~170°
- Диапазон движения ось 2
- -44°~189°
- Диапазон движения ось 3
- -62.5°~180°
- Диапазон движения ось 4
- -190°~190°
- Диапазон движения ось 5
- -125°~125°
- CRP-RH18-20, диапазон движения ось 6
- -360°~360°
- Максимальная скорость движения ось 1
- 329°/секунду
- Максимальная скорость движения ось 2
- 297.5°/секунду
- Максимальная скорость движения ось 3
- 426.5°/секунду
- Максимальная скорость движения ось 4
- 585°/секунду
- Максимальная скорость движения ось 5
- 450°/секунду
- Максимальная скорость движения ось 6
- 764°/секунду
- CRP-RH14-10, допустимый крутящий момент ось 4
- ±0.03 мм
- Максимальный охват
- 916 мм
- Вес робота
- 46 кг
- CRP-RH14-10, допустимый инерционный момент, ось 4
- к поверхности пола или потолка
- CRP-RH14-10, допустимый инерционный момент, ось 5
- 0-45°C
- CRP-RH14-10, допустимый инерционный момент, ось 6
- 20-85% (без конденсата)
- CRP-RH14-10, точность повторного позиционирования
- < 0.5 G
- CRP-RH14-10, Максимальный охват
- Робот должен быть установлен вдалеке от горючих или коррозионных жидкостей и газов, источников электрических помех
- Уровень IP
- IP54/IP65
- CRP-RH14-10, способ крепления
- Компактные размеры, высокая скорость, высокая точность, легкое управление, обширные области применения
- Применение
- Сварка, резка, сборка, транспортировка, шлифовка, маркировка
#D2306014811
持续性报价, 一点一点
按需询价
库存 ∞

Компания
Аудиторская проверка Пройдена
Дата публикации June 23, 2023
Получение
Москва Изменить
为您推荐的结果
![Однокомпонентный полиуретановый грунт EX Primer 5 кг ОПТ фото 1]()
![Грунтовка Глубокого проникновения «Оптимикс» 5 л фото 1]()
![Грунтовка Knauf Миттельгрунд для впитывающих оснований 10кг фото 1]()
持续性报价, 一点一点
Грунтовка Knauf Миттельгрунд для впитывающих оснований 10кгг Севастополь, ш Камышовое3 739 ₽![Грунтовка «Бетон-контакт» «Оптимикс» 20 л фото 1]()