Т
Tochka-да тегін шот ашыңыз
Өзіңізге немесе жақыныңызға үш айға тегін ерікті медициналық сақтандыру алыңыз.
Шот ашуҰқсас тауарлар жиынтығын алу

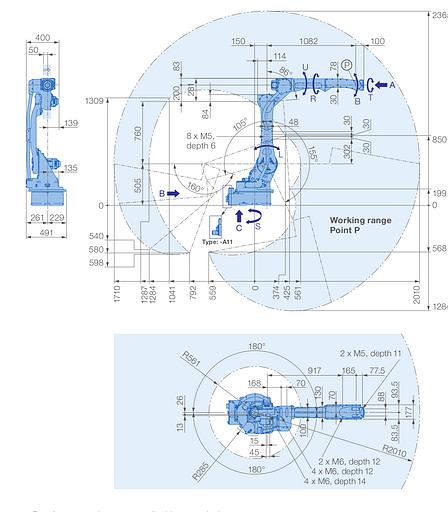
Промышленный робот Kawasaki BA006N
Көлік компаниялары

Беру шарттары
Сипаттамасы
Сипаттамалары
- Аудиторлық тексеру
- Орындалмаған
- Тип
- Промышленный робот
- Страна изготовителя
- Китай
- Производитель
- Kawasaki Robotics
- Категория
- Сварочные роботы
- Тип робота
- Шарнирный
- Управляемых осей (Степени свободы)
- 6
- Полезная нагрузка на кисть (кг)
- 6
- Предельная досягаемость (мм)
- 1,445
- Повторяемость (мм) (Соответствует ISO9283)
- ±0.06
- Угол поворота, рука вращение (JT1), (°)
- ±165
- Угол поворота, рука вперед-назад (JT2), (°)
- +150 − -90
- Угол поворота, рука вверх-вниз (JT3), (°)
- +90 — -175
- Угол поворота, запястье поворот (JT4), (°)
- ±180
- Угол поворота, запястье сгиб (JT5), (°)
- ±135
- Угол поворота, запястье вращение (JT6), (°)
- ±360
- Максимальная скорость, рука вращение (JT1), (°/s)
- 240
- Максимальная скорость, рука вперед-назад (JT2), (°/s)
- 240
- Максимальная скорость, рука вверх-вниз (JT3), (°/s)
- 220
- Максимальная скорость, запястье поворот (JT4), (°/s)
- 430
- Максимальная скорость, запястье сгиб (JT5), (°/s)
- 430
- Максимальная скорость, запястье вращение (JT6), (°/s)
- 650
- Момент силы, запястье поворот (JT4), (N•м)
- 12
- Момент силы, запястье сгиб (JT5), (N•м)
- 12
- Момент силы, запястье вращение (JT6), (N•м)
- 3.75
- Момент инерции, запястье поворот (JT4), (кг•м²)
- 0.4
- Момент инерции, запястье сгиб (JT5), (кг•м²)
- 0.4
- Момент инерции, запястье вращение (JT6), (кг•м²)
- 0.07
- Масса (кг)
- 150
- Цвет корпуса
- Munsell 10GY9/1 equivalent
- Монтажное положение
- Пол, потолок
- Температурный режим (°C)
- 0-45
- Относительная влажность (%)
- 35-85 (строгое отсутствие конденсата или инея)
- Требования по электропитанию (kVA) (Зависит от полезной нагрузки и моделей движения)
- 2.0
- Контроллер, America
- E01
- Контроллер, Europe
- E01
- Контроллер, Japan & Asia
- E01
Документы
ДЕКЛАРАЦИЯ О СООТВЕТСТВИИ
354 КБ
PDF
РАЗМЕРЫ И ДИАПАЗОНЫ ДВИЖЕНИЯ
222 КБ
PDF
2D CAD-МОДЕЛЬ
1 МБ
ZIP
3D CAD-МОДЕЛЬ
2 МБ
ZIP
#D2402008261
Тұрақты ұсыныс, даналап
Сұрау бойынша
Қолда бар ∞

Компания
Аудиторская проверка Пройдена
Дата публикации 20 ақпан 2024
Получение
Москва Изменить
Өзі тасымалдау
3 тамыз кешіктірмей тегін
Сізге арналған ұсынымдар
![Робот GP25-12 фото 1]()
![Робот GP25-12 фото 2]()
![Робот GP25-12 фото 3]()
![Промышленный робот манипулятор CRP-RA27-80 (T) фото 1]()
![Промышленный робот манипулятор CRP-RA27-80 (T) фото 2]()
![Промышленный робот манипулятор CRP-RA27-80 (T) фото 3]()
![Промышленный робот манипулятор CRP-RA27-80 (T) фото 4]()
![Промышленный робот манипулятор CRP-RA27-80 (T) фото 5]()
Тұрақты ұсыныс, даналап
Промышленный робот манипулятор CRP-RA27-80 (T)Россия, Московская областьСұраныс бойынша![Промышленный робот Fanuc M-1iA/0.5A фото 1]()
![Промышленный робот Fanuc M-1iA/0.5A фото 2]()
![Промышленный робот Fanuc M-1iA/0.5A фото 3]()
![Промышленный робот Fanuc M-1iA/0.5A фото 4]()
![Промышленный робот Fanuc M-1iA/0.5A фото 5]()
![Промышленные коллаборативные роботы HSR-BR625 фото 1]()
![Промышленные коллаборативные роботы HSR-BR625 фото 2]()