Т
Откройте счет в Точке бесплатно
Получите бесплатное ДМС на три месяца для себя или для близкого.
Открыть счетПолучить подборку похожих товаров

Промышленные коллаборативные роботы HSR-BR625
Транспортные компании

Условия передачи
Описание
Характеристики
- Аудиторская проверка
- Не проводилась
- Количество осей
- 6
- Максимальная нагрузка
- 25 кг
- Зона досягаемости
- 1849.5 мм
- Точность повторного позиционирования
- ±0.05 мм
- Движение по осям, J1
- ±155°
- Движение по осям, J2
- - 178°/-2°
- Движение по осям, J3
- +128°/+-2°
- Движение по осям, J4
- ±360°
- Движение по осям, J5
- ±131°
- Движение по осям, J6
- ±360°
- Скорость движения по осям, J1
- 233°/s,4.06 рад/с
- Скорость движения по осям, J2
- 235°/с, 4,10 рад/с
- Скорость движения по осям, J3
- 285°/с, 4.97 рад/с
- Скорость движения по осям, J4
- 487°/с, 8.49 рад/с
- Скорость движения по осям, J5
- 487°/с, 8.49 рад/с
- Скорость движения по осям, J6
- 487°/с, 8.49 рад/с
- Допустимый момент инерции, J6
- 2.0 кгм²
- Допустимый момент инерции, J5
- 3.7 кгм²
- Допустимый момент инерции, J4
- 3.7 кгм²
- Допустимый крутящий момент, J6
- 40.9 Нм
- Допустимый крутящий момент, J5
- 79.8 Нм
- Допустимый крутящий момент, J4
- 76.5 Нм
- Условия эксплуатации, температура
- 0〜450°C
- Условия эксплуатации, влажность
- 20%〜80%
- Условия эксплуатации, другое
- Избегать контакта с горючими или агрессивными средами а также электронных помех (плазмы)
- Длина кабеля пульта робота
- 8 м
- Длина кабеля блока управления
- 6 м
- Интерфейс ввода/вывода
- Контакты: 32-контактный вход (NPN), 32-контактный выход (NPN)
- Зарезервированный интерфейс
- 24 контакта
- Пневматическая трубка
- 2*Ø8
- Ёмкость аккумулятора
- 5.6 кВА
- Параметры сети
- 4.3 кВт 380V/8.1А
- Уровень защиты робот/шкаф управления
- IP5 (front end IP67)/IP53
- Способ установки
- Напольное, потолочное, настенное, под углом
- Масса робота/блока питания
- 210 кг/91 кг
#D2305004962
Постоянное предложение, поштучно
2 646 000 ₽
Стоимость за шт 2 646 000 ₽
Доступно ∞

Компания
Аудиторская проверка Пройдена
Дата публикации 12 мая 2023 г.
Получение
Москва Изменить
Самовывоз
не позже 22 октября , бесплатно
Доставка продавцом
Договорная
Рекомендации для вас
![Коллаборативный робот ROKAE CR12 фото 1]()
![Промышленный робот манипулятор CRP-RH18-20 фото 1]()
![Промышленный робот манипулятор CRP-RH18-20 фото 2]()
![Промышленный робот манипулятор CRP-RH18-20 фото 3]()
![Промышленный робот манипулятор CRP-RH18-20 фото 4]()
![Промышленный робот манипулятор CRP-RH18-20 фото 5]()
![Промышленный робот манипулятор CRP-RH18-20 фото 6]()
![Промышленный робот манипулятор CRP-RH18-20 фото 7]()
![Промышленный робот манипулятор CRP-RH18-20 фото 8]()
![Промышленный робот манипулятор CRP-RH18-20 фото 9]()
![Промышленный робот манипулятор CRP-RH18-20 фото 10]()
Постоянное предложение, поштучно
Промышленный робот манипулятор CRP-RH18-20Россия, Московская областьПо запросу![Промышленные коллаборативные роботы HSR-BR610 фото 1]()
![Промышленные коллаборативные роботы HSR-BR610 фото 2]()
Постоянное предложение, поштучно
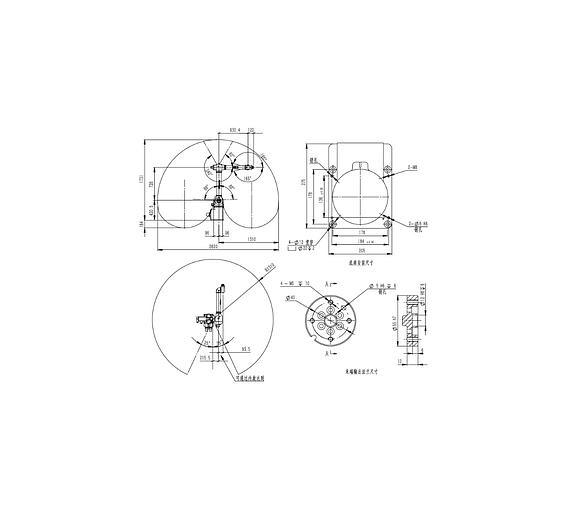
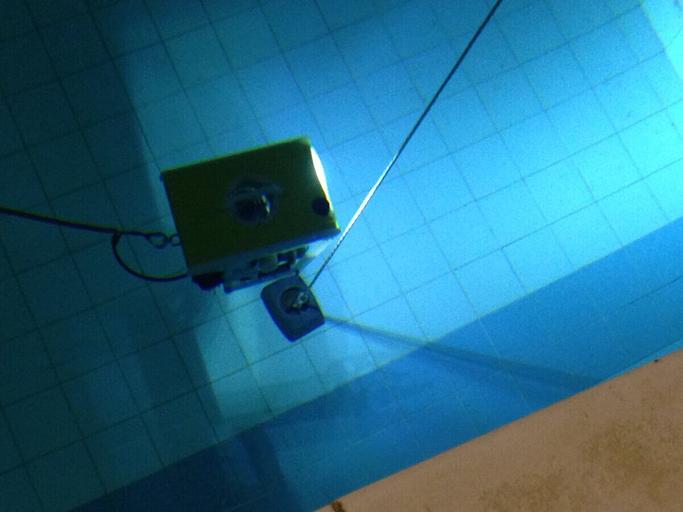
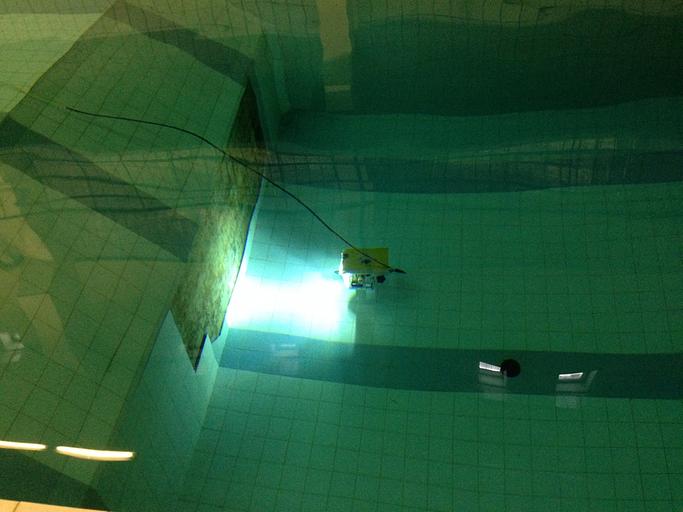
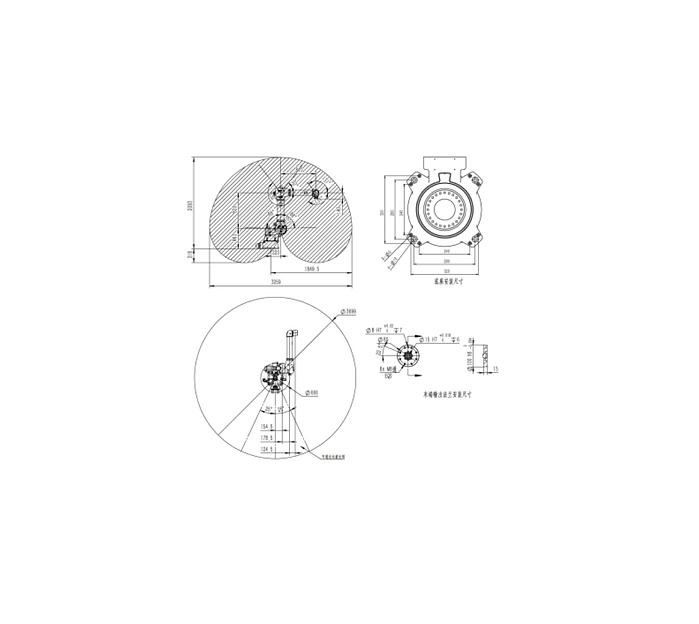
Промышленные коллаборативные роботы HSR-BR610Россия, Волгоград1 650 000 ₽![Телеуправляемый подводный аппарат ТНПА Гном Про Вектор фото 1]()
![Телеуправляемый подводный аппарат ТНПА Гном Про Вектор фото 2]()
![Телеуправляемый подводный аппарат ТНПА Гном Про Вектор фото 3]()
![Телеуправляемый подводный аппарат ТНПА Гном Про Вектор фото 4]()
![Телеуправляемый подводный аппарат ТНПА Гном Про Вектор фото 5]()
![Телеуправляемый подводный аппарат ТНПА Гном Про Вектор фото 6]()
![Телеуправляемый подводный аппарат ТНПА Гном Про Вектор фото 7]()
![Телеуправляемый подводный аппарат ТНПА Гном Про Вектор фото 8]()
![Телеуправляемый подводный аппарат ТНПА Гном Про Вектор фото 9]()
![Телеуправляемый подводный аппарат ТНПА Гном Про Вектор фото 10]()
Постоянное предложение, поштучно
Телеуправляемый подводный аппарат ТНПА Гном Про ВекторРоссия, МоскваПо запросу