Т
Open a free account with Tochka
Make deals faster and safer. Open an account with Tochka bank and get the status of 'Verified Supplier'.
Open accountUygun mahsulotlar to‘plamini olish

Промышленный робот Kawasaki MX420L
Транспортные компании

O'tkazish shartlari
Tavsif
Xarakteristikalar
- Auditorlik tekshiruvi
- Amalga oshirilmadi
- Тип
- Промышленный робот
- Страна изготовителя
- Китай
- Производитель
- Kawasaki Robotics
- Категория
- Сверхбольшая нагрузка 350-1500 кг
- Тип робота
- Шарнирный
- Управляемых осей (Степени свободы)
- 6
- Полезная нагрузка на кисть (кг)
- 420
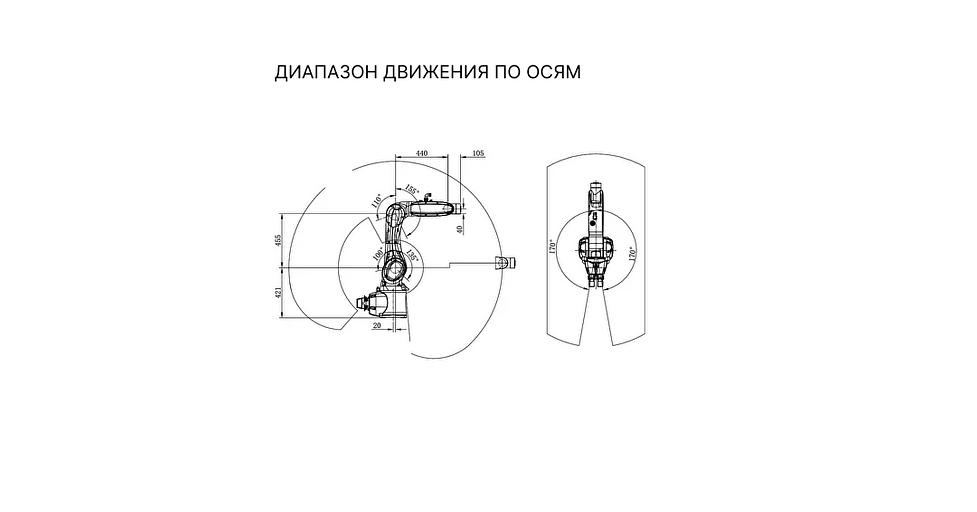
- Предельная досягаемость (мм)
- 2,778
- Повторяемость (мм) (Соответствует ISO9283)
- ±0.5
- Угол поворота (°), рука вращение (JT1)
- +180
- Угол поворота (°), рука вперед-назад (JT2)
- +90 − -45
- Угол поворота (°), рука вверх-вниз (JT3)
- +20 − -125
- Угол поворота (°), запястье поворот (JT4)
- ±360
- Угол поворота (°), запястье сгиб (JT5)
- ±110
- Угол поворота (°), запястье вращение (JT6)
- ±360
- Максимальная скорость (°/s), рука вращение (JT1)
- 80
- Максимальная скорость (°/s), рука вперед-назад (JT2)
- 70
- Максимальная скорость (°/s), рука вверх-вниз (JT3)
- 70
- Максимальная скорость (°/s), запястье поворот (JT4)
- 80
- Максимальная скорость (°/s), запястье сгиб (JT5)
- 80
- Максимальная скорость (°/s), запястье вращение (JT6)
- 120
- Момент силы (N•м), запястье поворот (JT4)
- 3,290
- Момент силы (N•м), запястье сгиб (JT5)
- 3,290
- Момент силы (N•м), запястье вращение (JT6)
- 1,960
- Момент инерции (кг•м²), запястье поворот (JT4)
- 400
- Момент инерции (кг•м²), запястье сгиб (JT5)
- 400
- Момент инерции (кг•м²), запястье вращение (JT6)
- 250
- Масса (кг)
- 2,800
- Цвет корпуса
- Munsell 10GY9/1 equivalent
- Монтажное положение
- Пол
- Температурный режим (°C)
- 0-45
- Относительная влажность (%)
- 35-85 (строгое отсутствие конденсата или инея)
- Контроллер
- E04
Документы
ДЕКЛАРАЦИЯ О СООТВЕТСТВИИ
354 КБ
PDF
3D CAD-МОДЕЛЬ
305 КБ
ZIP
2D CAD-МОДЕЛЬ
288 КБ
ZIP
РАЗМЕРЫ И ДИАПАЗОНЫ ДВИЖЕНИЯ
449 КБ
PDF
#D2402008415
Doimiy taklif, donalab
So'rov bo'yicha
Mavjud ∞

Компания
Просмотры 758
Кол-во продаж 758
Аудиторская проверка Пройдена
Дата публикации February 20, 2024
Получение
Москва Изменить
O'zi bilan olib ketish
13 July dan kechiktirmasdan , bepul
Siz uchun tavsiyalar
![Промышленный сварочный робот манипулятор CRP-RH14-06-W фото 1]()
![Промышленный сварочный робот манипулятор CRP-RH14-06-W фото 2]()
![Промышленный сварочный робот манипулятор CRP-RH14-06-W фото 3]()
![Промышленный сварочный робот манипулятор CRP-RH14-06-W фото 4]()
![Промышленный сварочный робот манипулятор CRP-RH14-06-W фото 5]()
![Промышленный сварочный робот манипулятор CRP-RH14-06-W фото 6]()
Doimiy taklif, donalab
Промышленный сварочный робот манипулятор CRP-RH14-06-WРоссия, Московская областьTalab bo'yicha![Промышленный робот манипулятор CRP-RA09-06 фото 1]()
![Промышленный робот манипулятор CRP-RA09-06 фото 2]()
![Промышленный робот манипулятор CRP-RA09-06 фото 3]()
![Промышленный робот манипулятор CRP-RA09-06 фото 4]()
![Промышленный робот манипулятор CRP-RA09-06 фото 5]()
![Промышленный робот манипулятор CRP-RA09-06 фото 6]()
![Промышленный робот манипулятор CRP-RA09-06 фото 7]()
Doimiy taklif, donalab
Промышленный робот манипулятор CRP-RA09-06Россия, Московская областьTalab bo'yicha![Промышленный робот Fanuc M-1iA/0.5A фото 1]()
![Промышленный робот Fanuc M-1iA/0.5A фото 2]()
![Промышленный робот Fanuc M-1iA/0.5A фото 3]()
![Промышленный робот Fanuc M-1iA/0.5A фото 4]()
![Промышленный робот Fanuc M-1iA/0.5A фото 5]()
![Промышленный робот манипулятор CRP-RA27-80 (T) фото 1]()
![Промышленный робот манипулятор CRP-RA27-80 (T) фото 2]()
![Промышленный робот манипулятор CRP-RA27-80 (T) фото 3]()
![Промышленный робот манипулятор CRP-RA27-80 (T) фото 4]()
![Промышленный робот манипулятор CRP-RA27-80 (T) фото 5]()
Doimiy taklif, donalab
Промышленный робот манипулятор CRP-RA27-80 (T)Россия, Московская областьTalab bo'yicha