Промышленный робот манипулятор RH14-10





Условия передачи
Описание
Характеристики
- Форма руки
- Вертикальный узловой шарнир
- Степень подвижности
- 6 осей
- Максимальная нагрузка
- 10 кг
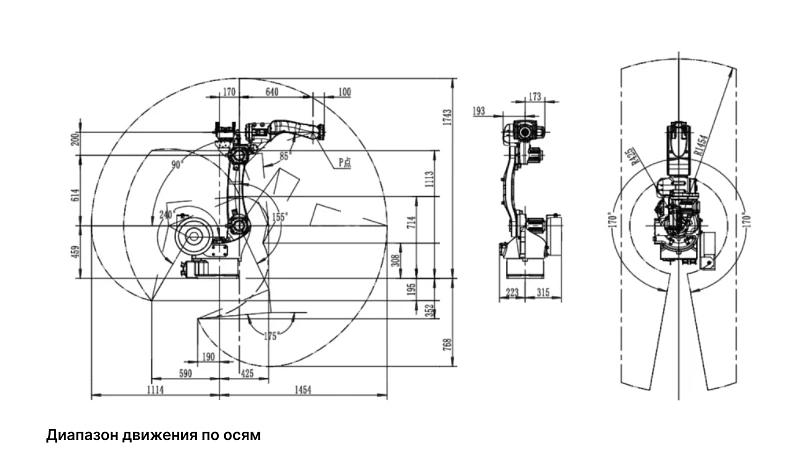
- Диапазон движения по оси 1
- Крепление к полу или потолку~167°~167°, настенное крепление~30°~30°
- Диапазон движения по оси 2
- 0°~175°
- Диапазон движения по оси 3
- ~80°~150°
- Диапазон движения по оси 4
- ~190°~190°
- Диапазон движения по оси 5
- ~105°~130°
- Диапазон движения по оси 6
- ~210°~210°
- Максимальная скорость движения по оси 1
- 169°/секунду
- Максимальная скорость движения по оси 2
- 169°/секунду
- Максимальная скорость движения по оси 3
- 169°/секунду
- Максимальная скорость движения по оси 4
- 280°/секунду
- Максимальная скорость движения по оси 5
- 240°/секунду
- Максимальная скорость движения по оси 6
- 520°/секунду
- Допустимый крутящий момент по оси 4
- 10 Н·м
- Допустимый крутящий момент по оси 5
- 10 Н·м
- Допустимый крутящий момент по оси 6
- 3 Н·м
- Допустимый инерционный момент по оси 4
- 0.25 кг/м²
- Допустимый инерционный момент по оси 5
- 0.25 кг/м²
- Допустимый инерционный момент по оси 6
- 0.05 кг/м²
- Точность повторного позиционирования
- ±0.08 мм
- Максимальный охват
- 1440 мм
- Вес робота
- 170 кг
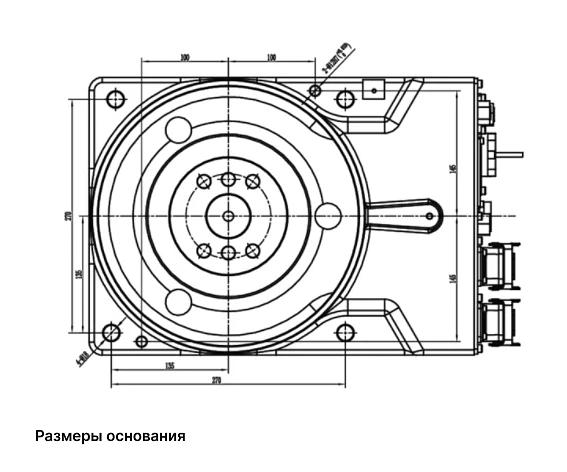
- Способ крепления
- К поверхности пола или потолка
- Требования к условиям использования, средняя температура
- 0-45°C
- Требования к условиям использования, относительная влажность
- 20-85% (без конденсата)
- Требования к условиям использования, вибрации
- < 0.5 G
- Другие
- Робот должен быть установлен вдалеке от горючих или коррозионных жидкостей и газов, источников электрических помех
- Уровень корпуса IP
- IP54
- Уровень манипулятора
- IP67
- Преимущества
- Компактные размеры, высокая скорость, высокая точность, легкое управление, обширные области применения
- Применение
- Сварка, фрезерование, сборка, перемещение, шлифовка, лазерная и плазменная резка
#D2309017440
Постоянное предложение, поштучно
По запросу

Компания
Просмотры 0
Кол-во продаж 0
Аудиторская проверка
Дата публикации September 21, 2023
Получение
Дублинино Изменить
Самовывоз
не позже 11 April , бесплатно
Доставка продавцом
Договорная