Т
Tochka-да тегін шот ашыңыз
Мәмілелерді тезірек және қауіпсіз жасаңыз. Tochka банкінде шот ашып, «Тексерілген жеткізуші» мәртебесін алыңыз.
Шот ашуҰқсас тауарлар жиынтығын алу

Промышленный робот Kawasaki BX300L
Транспортные компании

Беру шарттары
Сипаттамасы
Сипаттамалары
- Аудиторлық тексеру
- Орындалмаған
- Тип
- Промышленный робот
- Страна изготовителя
- Китай
- Производитель
- Kawasaki Robotics
- Категория
- Большая нагрузка 100-300 кг
- Тип робота
- Шарнирный
- Управляемых осей (Степени свободы)
- 6
- Полезная нагрузка на кисть (кг)
- 300
- Предельная досягаемость (мм)
- 2,812
- Повторяемость (мм) (Значение соответствует ISO9283)
- ±0.07
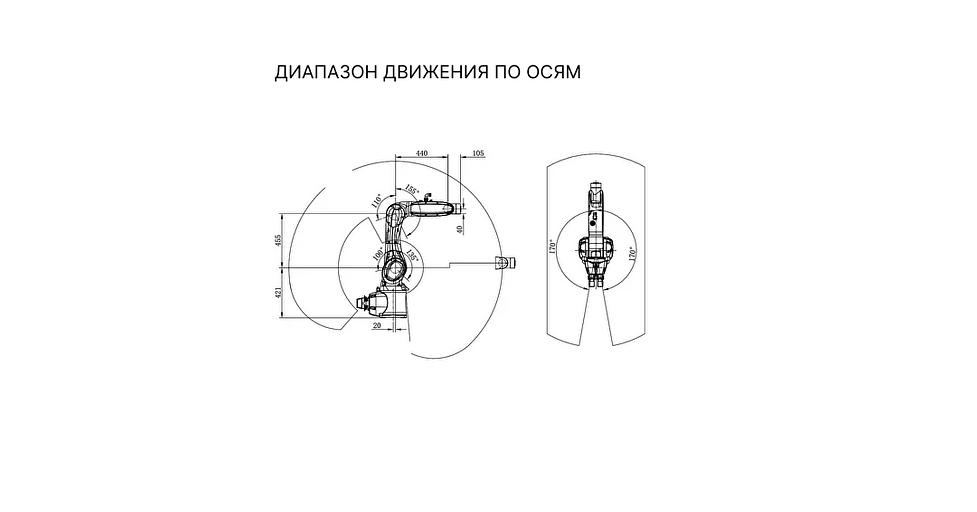
- Угол поворота (°), рука вращение (JT1)
- ±180
- Угол поворота (°), рука вперед-назад (JT2)
- +76 − -60
- Угол поворота (°), рука вверх-вниз (JT3)
- +90 − -120
- Угол поворота (°), запястье поворот (JT4)
- ±210
- Угол поворота (°), запястье сгиб (JT5)
- ±125
- Угол поворота (°), запястье вращение (JT6)
- ±210
- Максимальная скорость (°/s), рука вращение (JT1)
- 125
- Максимальная скорость (°/s), рука вперед-назад (JT2)
- 102
- Максимальная скорость (°/s), рука вверх-вниз (JT3)
- 85
- Максимальная скорость (°/s), запястье поворот (JT4)
- 105
- Максимальная скорость (°/s), запястье сгиб (JT5)
- 110
- Максимальная скорость (°/s), запястье вращение (JT6)
- 180
- Момент силы (N•м), запястье поворот (JT4)
- 2,300
- Момент силы (N•м), запястье сгиб (JT5)
- 2,300
- Момент силы (N•м), запястье вращение (JT6)
- 1,000
- Момент инерции (кг•м²), запястье поворот (JT4)
- 240
- Момент инерции (кг•м²), запястье сгиб (JT5)
- 240
- Момент инерции (кг•м²), запястье вращение (JT6)
- 200
- Масса (кг)
- 1,460
- Цвет корпуса
- Munsell 10GY9/1 equivalent
- Монтажное положение
- Floor
- Температурный режим (°C)
- 0-45
- Относительная влажность (%)
- 35-85 (строгое отсутствие конденсата или инея)
- Требования по электропитанию (kVA) (В зависимости от нагрузки и характера движения)
- 7.5
- Степень защиты запастья
- IP67 equivalent
- Степень защиты корпуса
- IP54 equivalent
- Степень защиты руки
- IP54 equivalent
- Контроллер, Америка
- F02
- Контроллер, Европа
- F02
- Контроллер, Япония и Азия
- F02
Документы
ДЕКЛАРАЦИЯ О СООТВЕТСТВИИ
354 КБ
PDF
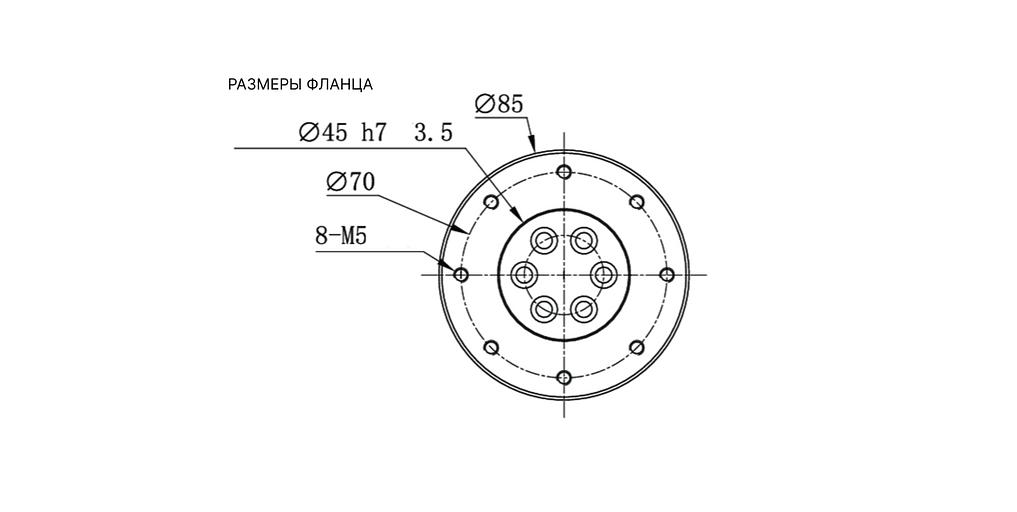
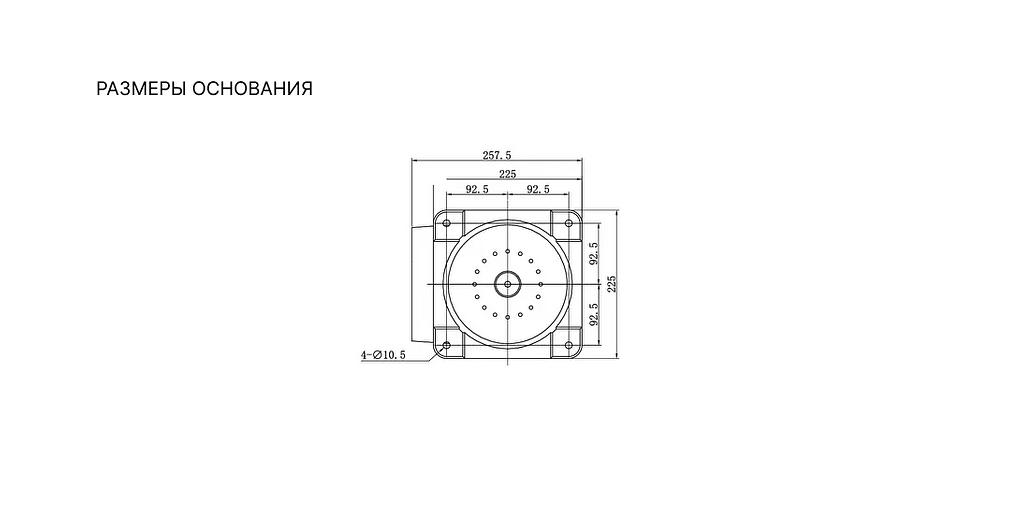
РАЗМЕРЫ И ДИАПАЗОНЫ ДВИЖЕНИЯ
244 КБ
PDF
3D CAD-МОДЕЛЬ
2 МБ
ZIP
2D CAD-МОДЕЛЬ
3 МБ
ZIP
#D2402008369
Тұрақты ұсыныс, даналап
Сұрау бойынша
Қолда бар ∞

Компания
Просмотры 758
Кол-во продаж 758
Аудиторская проверка Пройдена
Дата публикации 20 ақпан 2024
Получение
Москва Изменить
Өзі тасымалдау
14 шілде кешіктірмей тегін
Сізге арналған ұсынымдар
![Промышленный сварочный робот манипулятор CRP-RH14-06-W фото 1]()
![Промышленный сварочный робот манипулятор CRP-RH14-06-W фото 2]()
![Промышленный сварочный робот манипулятор CRP-RH14-06-W фото 3]()
![Промышленный сварочный робот манипулятор CRP-RH14-06-W фото 4]()
![Промышленный сварочный робот манипулятор CRP-RH14-06-W фото 5]()
![Промышленный сварочный робот манипулятор CRP-RH14-06-W фото 6]()
Тұрақты ұсыныс, даналап
Промышленный сварочный робот манипулятор CRP-RH14-06-WРоссия, Московская областьСұраныс бойынша![Промышленный робот манипулятор CRP-RA09-06 фото 1]()
![Промышленный робот манипулятор CRP-RA09-06 фото 2]()
![Промышленный робот манипулятор CRP-RA09-06 фото 3]()
![Промышленный робот манипулятор CRP-RA09-06 фото 4]()
![Промышленный робот манипулятор CRP-RA09-06 фото 5]()
![Промышленный робот манипулятор CRP-RA09-06 фото 6]()
![Промышленный робот манипулятор CRP-RA09-06 фото 7]()
Тұрақты ұсыныс, даналап
Промышленный робот манипулятор CRP-RA09-06Россия, Московская областьСұраныс бойынша![Промышленный робот Fanuc M-1iA/0.5A фото 1]()
![Промышленный робот Fanuc M-1iA/0.5A фото 2]()
![Промышленный робот Fanuc M-1iA/0.5A фото 3]()
![Промышленный робот Fanuc M-1iA/0.5A фото 4]()
![Промышленный робот Fanuc M-1iA/0.5A фото 5]()
![Промышленный робот манипулятор CRP-RA27-80 (T) фото 1]()
![Промышленный робот манипулятор CRP-RA27-80 (T) фото 2]()
![Промышленный робот манипулятор CRP-RA27-80 (T) фото 3]()
![Промышленный робот манипулятор CRP-RA27-80 (T) фото 4]()
![Промышленный робот манипулятор CRP-RA27-80 (T) фото 5]()
Тұрақты ұсыныс, даналап
Промышленный робот манипулятор CRP-RA27-80 (T)Россия, Московская областьСұраныс бойынша