Т
Open a free account with Tochka
Get free voluntary health insurance for three months for yourself or a loved one.
Open accountGet a similar product collection

Промышленные коллаборативные роботы HSR-CR610
Transport companies


Shipping condition
Description
Specifications
- Auditing
- Not conducted
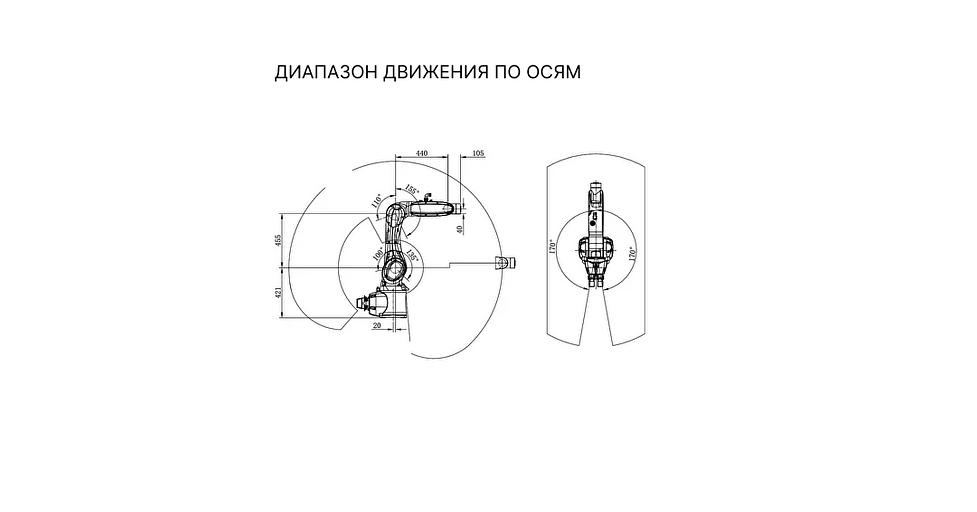
- Количество осей
- 6
- Максимальная нагрузка
- 10 кг
- Зона досягаемости
- 1150 мм
- Точность повторного позиционирования
- ±0,04 мм
- Движение по осям, J1
- ±180°
- Движение по осям, J2
- - 220°/﹢40°
- Движение по осям, J3
- - 55°/﹢235°
- Движение по осям, J4
- ±180°
- Движение по осям, J5
- ±130°
- Движение по осям, J6
- ±180°
- Скорость движения по осям, J1
- 120°/с, 2,09 рад/с
- Скорость движения по осям, J2
- 120°/с, 2,09 рад/с
- Скорость движения по осям, J3
- 150°/с, 2,62 рад/с
- Скорость движения по осям, J4
- 225°/с, 3,93 рад/с
- Скорость движения по осям, J5
- 225°/с, 3,93 рад/с
- Скорость движения по осям, J6
- 225°/с, 3,93 рад/с
- Допустимый момент инерции, J6
- 0,96 кгм²
- Допустимый момент инерции, J5
- 0,96 кгм²
- Допустимый момент инерции, J4
- 0,96 кгм²
- Допустимый крутящий момент, J6
- 30 Нм
- Допустимый крутящий момент, J5
- 30 Нм
- Допустимый крутящий момент, J4
- 30 Нм
- Условия эксплуатации, температура
- 0〜45 0 С
- Условия эксплуатации, влажность
- 20%〜80%
- Условия эксплуатации, другое
- Избегать контакта с горючими или агрессивными средами а также электронных помех (плазмы)
- Длина кабеля пульта робота
- 8 м
- Длина кабеля блока управления
- 3 м
- Интерфейс ввода/вывода
- 16/16
- Ёмкость аккумулятора
- 2 кВА
- Параметры сети
- 1.2 кВт 220V/6A
- Уровень защиты робот/шкаф управления
- IP54
- Способ установки
- Напольное/под углом/потолочное
- Масса робота/блока питания
- 41 кг/18 кг
#D2305004988
Permanent offer, piece by piece
1 956 000 ₽
Price per piece 1 956 000 ₽
Available ∞

Компания
Аудиторская проверка Пройдена
Дата публикации May 12, 2023
Получение
Москва Изменить
Pick up
no later than 24 October , free of charge
Seller delivery
negotiable
Recommendations for you
![Сварочный робот-манипулятор, 6 осей фото 1]()
![Промышленный робот FANUC LR Mate 200iD/4S фото 1]()
![Промышленный робот FANUC LR Mate 200iD/4S фото 2]()
![Промышленный робот FANUC LR Mate 200iD/4S фото 3]()
![Промышленный робот FANUC LR Mate 200iD/4S фото 4]()
![Промышленный робот FANUC LR Mate 200iD/4S фото 5]()
![Робот манипулятор А12-1450 фото 1]()
![Промышленный робот манипулятор CRP-RA09-06 фото 1]()
![Промышленный робот манипулятор CRP-RA09-06 фото 2]()
![Промышленный робот манипулятор CRP-RA09-06 фото 3]()
![Промышленный робот манипулятор CRP-RA09-06 фото 4]()
![Промышленный робот манипулятор CRP-RA09-06 фото 5]()
![Промышленный робот манипулятор CRP-RA09-06 фото 6]()
![Промышленный робот манипулятор CRP-RA09-06 фото 7]()
Permanent offer, piece by piece
Промышленный робот манипулятор CRP-RA09-06Россия, Московская областьПо запросу