Т
Open a free account with Tochka
Make deals faster and safer. Open an account with Tochka bank and get the status of 'Verified Supplier'.
Open accountGet a similar product collection

Промышленный робот Kawasaki RS050N
Транспортные компании

Shipping condition
Description
Specifications
- Auditing
- Not conducted
- Тип
- Промышленный робот
- Страна изготовителя
- Китай
- Производитель
- Kawasaki Robotics
- Категория
- Малая-средняя нагрузка 3-80 кг
- Тип робота
- Шарнирный
- Управляемых осей (Степени свободы)
- 6
- Полезная нагрузка на кисть (кг)
- 50
- Предельная досягаемость (мм)
- 2,100
- Повторяемость (мм) (Соответствует ISO9283)
- ±0.06
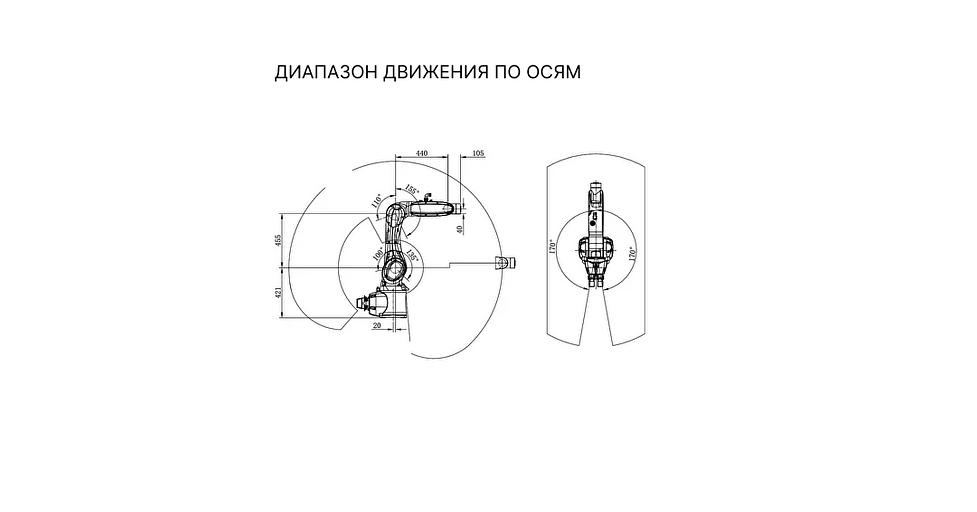
- Угол поворота (°), рука вращение (JT1)
- ±180
- Угол поворота (°), рука вперед-назад (JT2)
- ±140 − -105
- Угол поворота (°), рука вверх-вниз (JT3)
- ±135 − -155
- Угол поворота (°), запястье поворот (JT4)
- ±360
- Угол поворота (°), запястье сгиб (JT5)
- ±145
- Угол поворота (°), запястье вращение (JT6)
- ±360
- Максимальная скорость (°/s), рука вращение (JT1)
- 180
- Максимальная скорость (°/s), рука вперед-назад (JT2)
- 180
- Максимальная скорость (°/s), рука вверх-вниз (JT3)
- 185
- Максимальная скорость (°/s), запястье поворот (JT4)
- 260
- Максимальная скорость (°/s), запястье сгиб (JT5)
- 260
- Максимальная скорость (°/s), запястье вращение (JT6)
- 360
- Момент силы (N•м), запястье поворот (JT4)
- 210
- Момент силы (N•м), запястье сгиб (JT5)
- 210
- Момент силы (N•м), запястье вращение (JT6)
- 130
- Момент инерции (кг•м²), запястье поворот (JT4)
- 28
- Момент инерции (кг•м²), запястье сгиб (JT5)
- 28
- Момент инерции (кг•м²), запястье вращение (JT6)
- 11
- Масса (кг)
- 555
- Цвет корпуса
- Munsell 10GY9/1 equivalent
- Монтажное положение
- Пол, потолок
- Температурный режим (°C)
- 0-45
- Относительная влажность (%)
- 35-85 (строгое отсутствие конденсата или инея)
- Требования по электропитанию (kVA)
- 4.5
- Степень защиты, запастье
- IP67 equivalent
- Степень защиты, корпус
- IP65 equivalent
- Степень защиты, рука
- IP65 equivalent
- Контроллер
- E02
Документы
ДЕКЛАРАЦИЯ О СООТВЕТСТВИИ
354 КБ
PDF
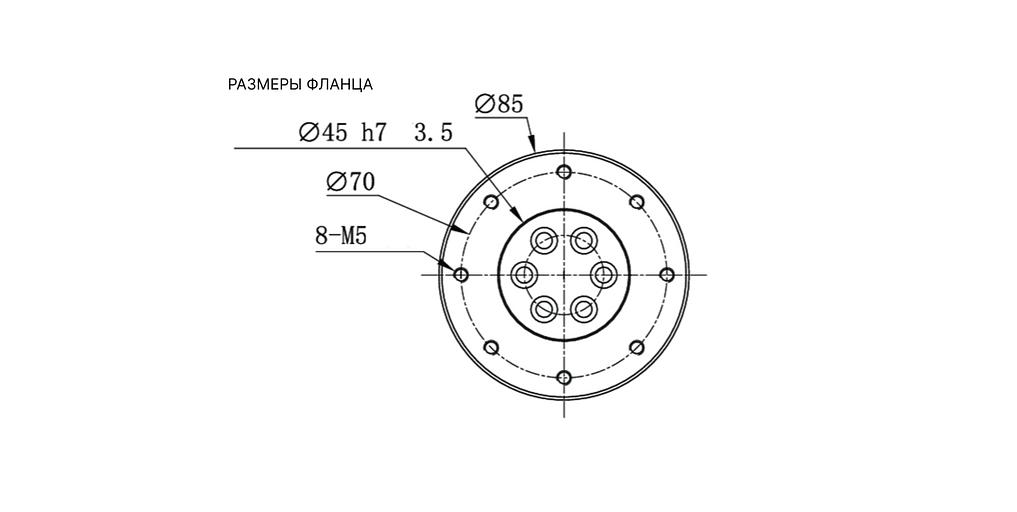
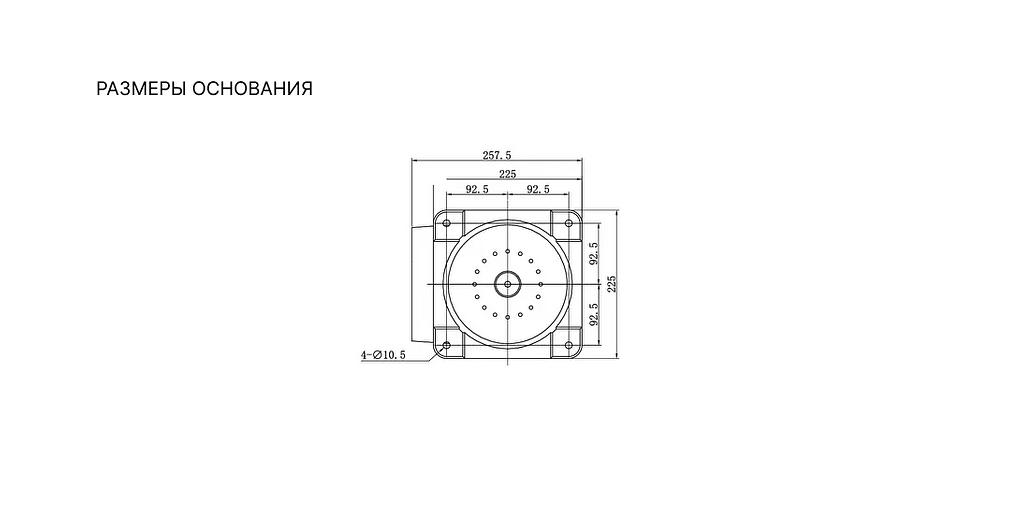
РАЗМЕРЫ И ДИАПАЗОНЫ ДВИЖЕНИЯ
508 КБ
PDF
2D CAD-МОДЕЛЬ
646 КБ
ZIP
3D CAD-МОДЕЛЬ
732 КБ
ZIP
#D2402008430
Permanent offer, piece by piece
On request
Available ∞

Компания
Просмотры 758
Кол-во продаж 758
Аудиторская проверка Пройдена
Дата публикации February 20, 2024
Получение
Москва Изменить
Pick up
no later than 11 July , free of charge
Recommendations for you
![Промышленный сварочный робот манипулятор CRP-RH14-06-W фото 1]()
![Промышленный сварочный робот манипулятор CRP-RH14-06-W фото 2]()
![Промышленный сварочный робот манипулятор CRP-RH14-06-W фото 3]()
![Промышленный сварочный робот манипулятор CRP-RH14-06-W фото 4]()
![Промышленный сварочный робот манипулятор CRP-RH14-06-W фото 5]()
![Промышленный сварочный робот манипулятор CRP-RH14-06-W фото 6]()
Permanent offer, piece by piece
Промышленный сварочный робот манипулятор CRP-RH14-06-WРоссия, Московская областьПо запросу![Промышленный робот манипулятор CRP-RA09-06 фото 1]()
![Промышленный робот манипулятор CRP-RA09-06 фото 2]()
![Промышленный робот манипулятор CRP-RA09-06 фото 3]()
![Промышленный робот манипулятор CRP-RA09-06 фото 4]()
![Промышленный робот манипулятор CRP-RA09-06 фото 5]()
![Промышленный робот манипулятор CRP-RA09-06 фото 6]()
![Промышленный робот манипулятор CRP-RA09-06 фото 7]()
Permanent offer, piece by piece
Промышленный робот манипулятор CRP-RA09-06Россия, Московская областьПо запросу![Промышленный робот Fanuc M-1iA/0.5A фото 1]()
![Промышленный робот Fanuc M-1iA/0.5A фото 2]()
![Промышленный робот Fanuc M-1iA/0.5A фото 3]()
![Промышленный робот Fanuc M-1iA/0.5A фото 4]()
![Промышленный робот Fanuc M-1iA/0.5A фото 5]()
![Промышленный робот манипулятор CRP-RA27-80 (T) фото 1]()
![Промышленный робот манипулятор CRP-RA27-80 (T) фото 2]()
![Промышленный робот манипулятор CRP-RA27-80 (T) фото 3]()
![Промышленный робот манипулятор CRP-RA27-80 (T) фото 4]()
![Промышленный робот манипулятор CRP-RA27-80 (T) фото 5]()
Permanent offer, piece by piece
Промышленный робот манипулятор CRP-RA27-80 (T)Россия, Московская областьПо запросу