Т
Open a free account with Tochka
Get free voluntary health insurance for three months for yourself or a loved one.
Open accountGet a similar product collection

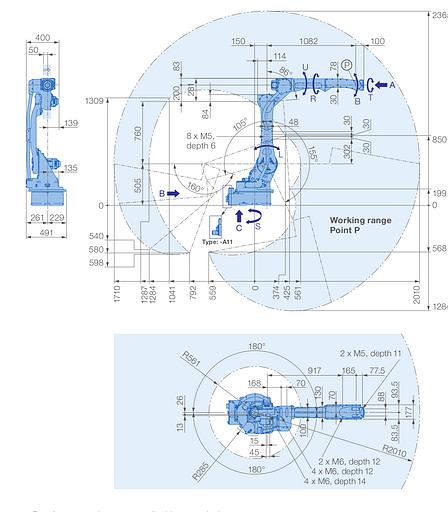
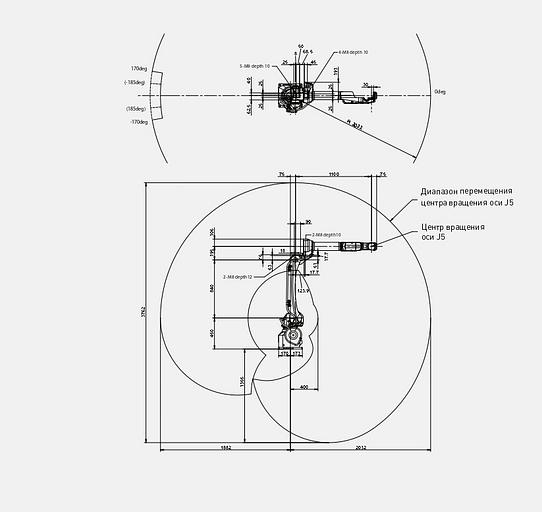
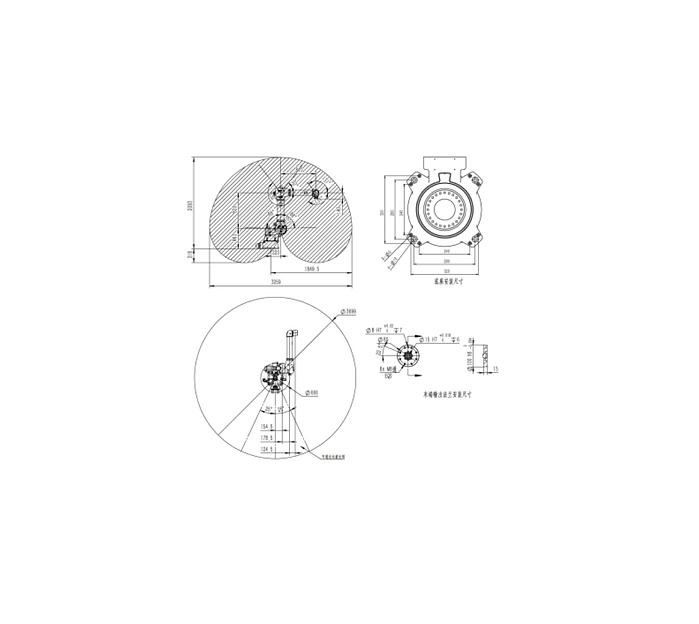
Промышленные коллаборативные роботы HSR-BR625
Transport companies

Shipping condition
Description
Specifications
- Auditing
- Not conducted
- Количество осей
- 6
- Максимальная нагрузка
- 25 кг
- Зона досягаемости
- 1849.5 мм
- Точность повторного позиционирования
- ±0.05 мм
- Движение по осям, J1
- ±155°
- Движение по осям, J2
- - 178°/-2°
- Движение по осям, J3
- +128°/+-2°
- Движение по осям, J4
- ±360°
- Движение по осям, J5
- ±131°
- Движение по осям, J6
- ±360°
- Скорость движения по осям, J1
- 233°/s,4.06 рад/с
- Скорость движения по осям, J2
- 235°/с, 4,10 рад/с
- Скорость движения по осям, J3
- 285°/с, 4.97 рад/с
- Скорость движения по осям, J4
- 487°/с, 8.49 рад/с
- Скорость движения по осям, J5
- 487°/с, 8.49 рад/с
- Скорость движения по осям, J6
- 487°/с, 8.49 рад/с
- Допустимый момент инерции, J6
- 2.0 кгм²
- Допустимый момент инерции, J5
- 3.7 кгм²
- Допустимый момент инерции, J4
- 3.7 кгм²
- Допустимый крутящий момент, J6
- 40.9 Нм
- Допустимый крутящий момент, J5
- 79.8 Нм
- Допустимый крутящий момент, J4
- 76.5 Нм
- Условия эксплуатации, температура
- 0〜450°C
- Условия эксплуатации, влажность
- 20%〜80%
- Условия эксплуатации, другое
- Избегать контакта с горючими или агрессивными средами а также электронных помех (плазмы)
- Длина кабеля пульта робота
- 8 м
- Длина кабеля блока управления
- 6 м
- Интерфейс ввода/вывода
- Контакты: 32-контактный вход (NPN), 32-контактный выход (NPN)
- Зарезервированный интерфейс
- 24 контакта
- Пневматическая трубка
- 2*Ø8
- Ёмкость аккумулятора
- 5.6 кВА
- Параметры сети
- 4.3 кВт 380V/8.1А
- Уровень защиты робот/шкаф управления
- IP5 (front end IP67)/IP53
- Способ установки
- Напольное, потолочное, настенное, под углом
- Масса робота/блока питания
- 210 кг/91 кг
#D2305004962
Permanent offer, piece by piece
2 646 000 ₽
Price per piece 2 646 000 ₽
Available ∞

Компания
Аудиторская проверка Пройдена
Дата публикации May 12, 2023
Получение
Москва Изменить
Pick up
no later than 24 October , free of charge
Seller delivery
negotiable